Rotation around Y-axis
Rotation around X-axis
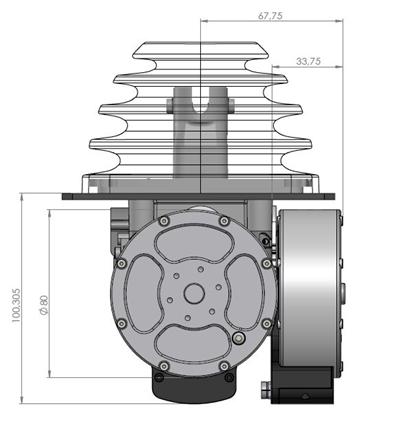
Axis MR Brake
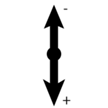
Joystick axis
Joystick
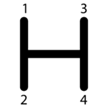
4-Speed
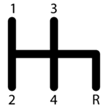
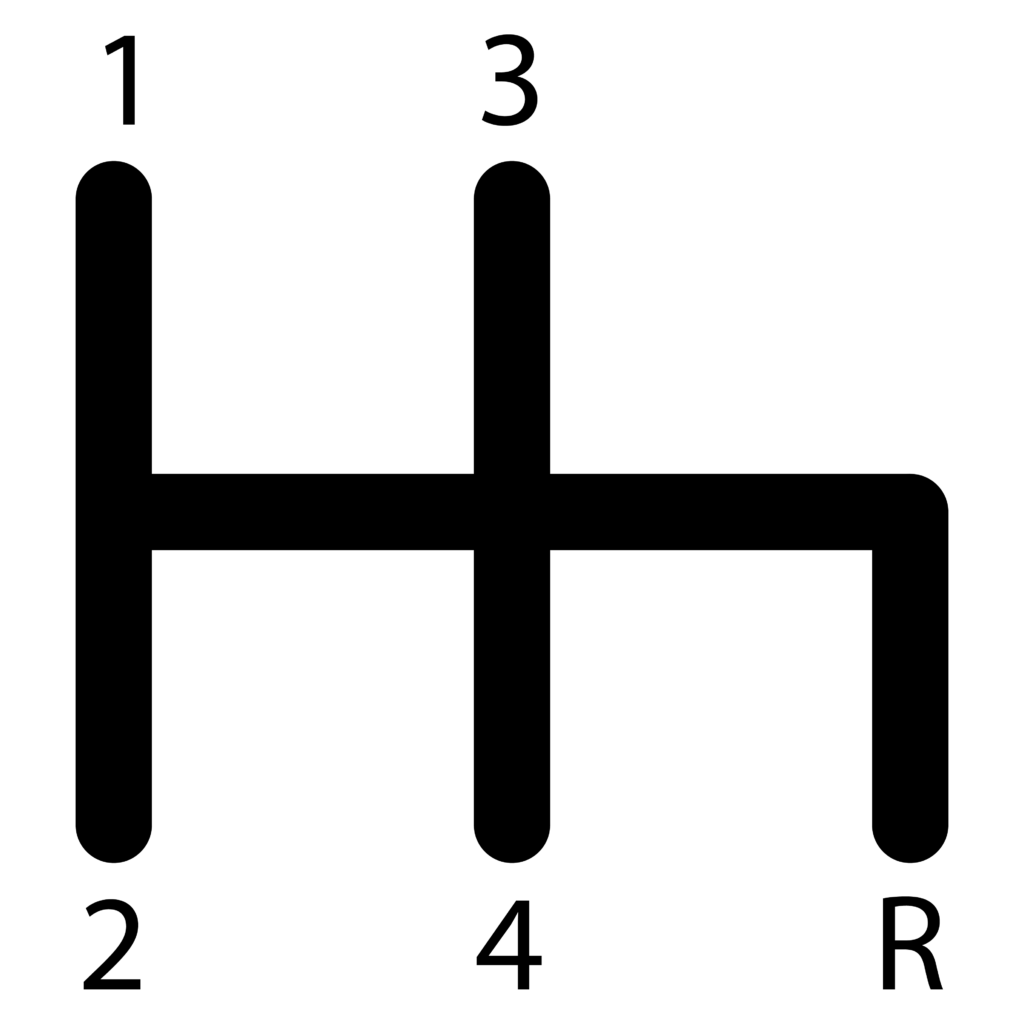
4-Speed-R
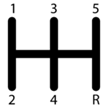
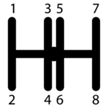
5-Speed-R
Double-H
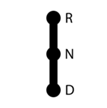
RND
Sequential
Joystick
4-Speed

4-Speed-R
5-Speed-R

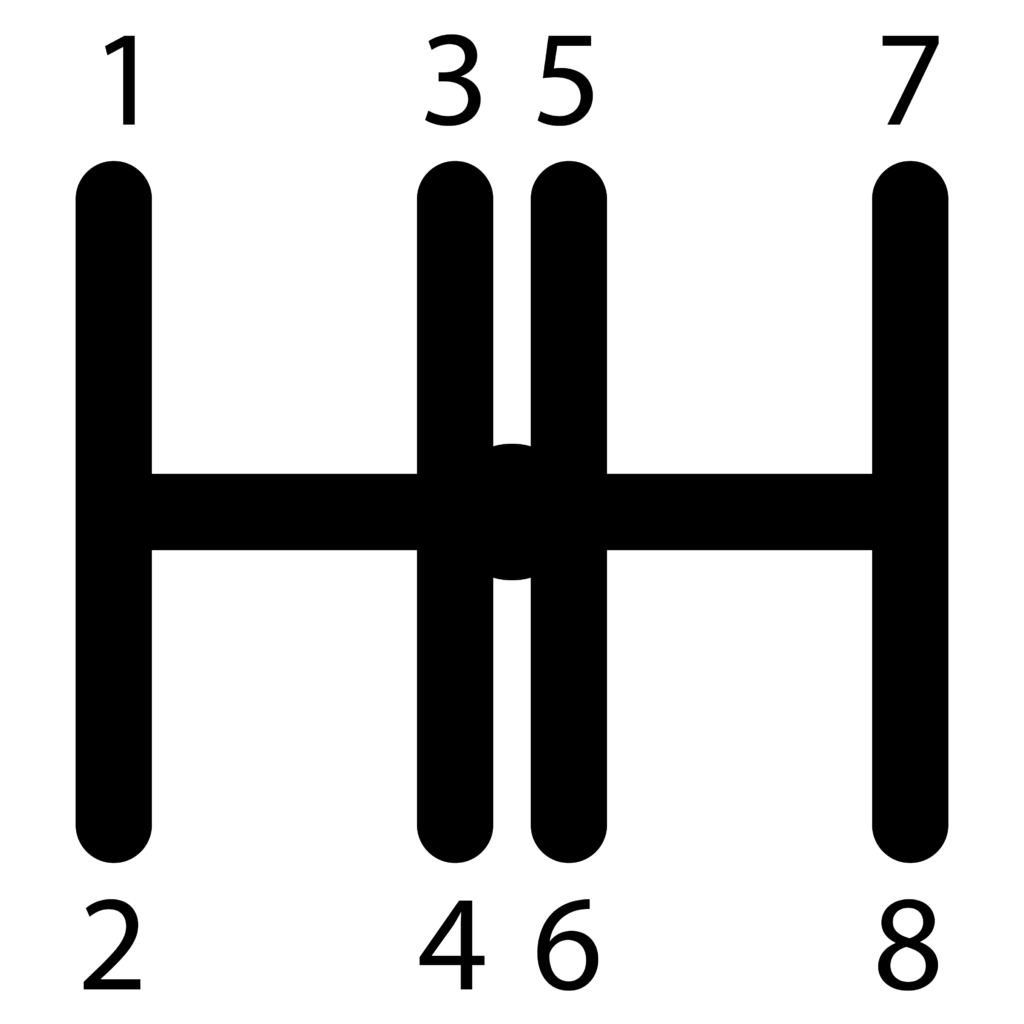
Double-H
RND

Sequential