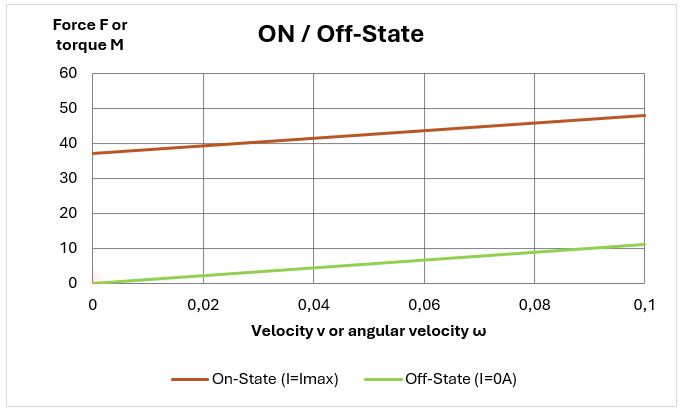
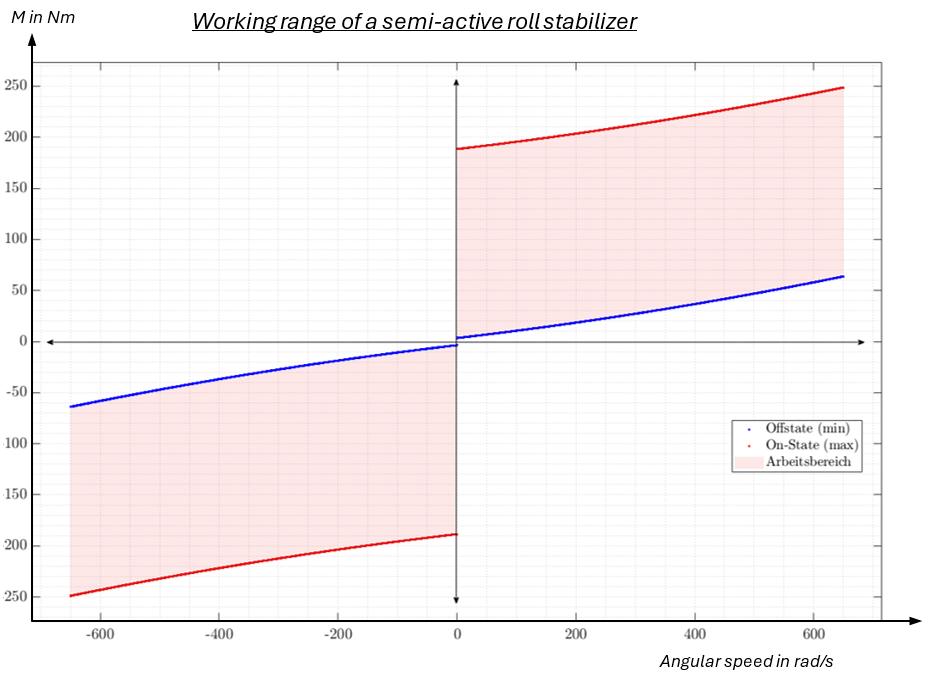
The ON-OFF state diagram (I=Imax or I=oA) shows the usual behavior of an actuator operated in flow mode with the basic hydraulic damping (green characteristic curve) and the maximum damping via the additional MR effect (orange characteristics curve). The range between the two characteristic curves can be varied via control from 0-100% of the maximum oil current.
The great advantage over purely hydraulic actuators is that, on the one hand, high forces/torques can be generated even at no speed and on the other hand, an entire working range can be used variably.
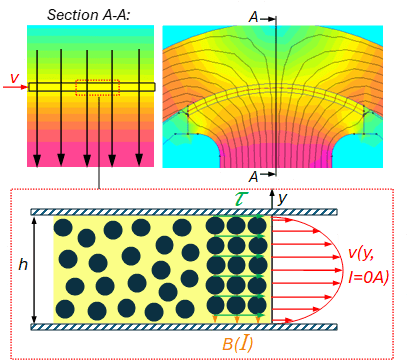
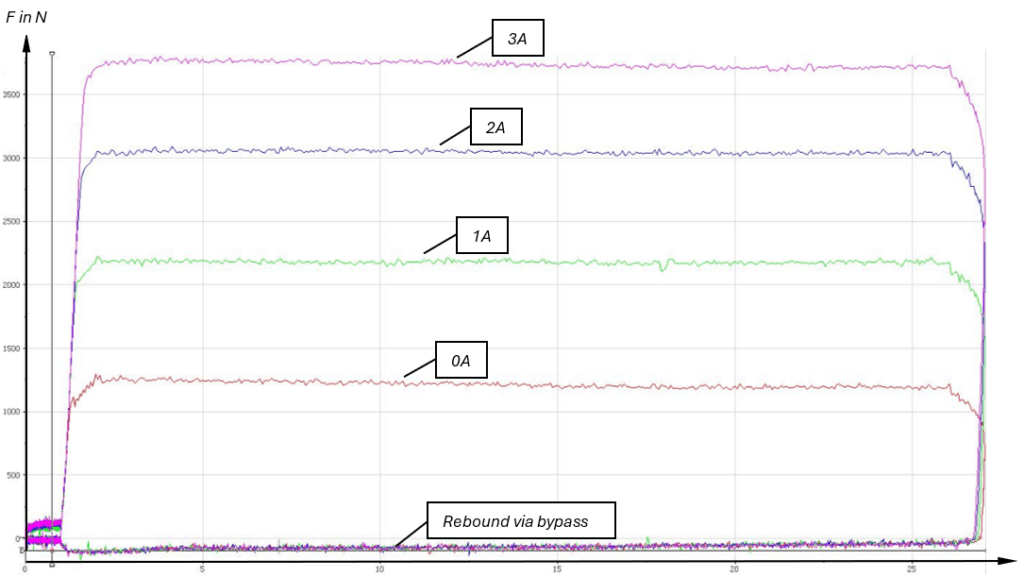
The diagram shows a force-displacement diagram of a linear damper with an installed permanent magnet with a travel speed of 65 mm/s. The diagram Fig. 6 illustrates how a fail-safe function can be implemented in the currentless state = 0A (fail-safe function: basic force at 0A); the effect can be increased by applying current, as shown with 1A, 2A and 3A, but a reduction down to the minimum basic force is also possible with a corresponding negative current (not shown).
The bypass, which is effective in the tension stage, enables low-friction resetting in the tension direction regardless of the current applied, as it is not subjected to the magnetic field.
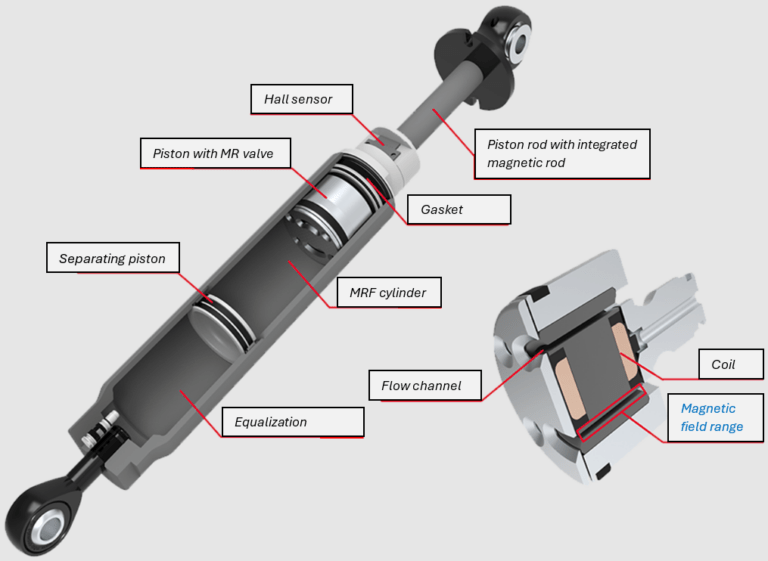
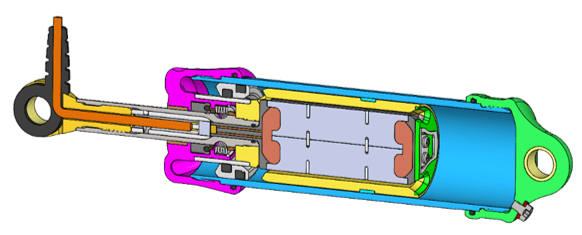
With the damper concept shown here with a cylinder inner diameter of 30 mm, over 3500 N can be achieved at low speeds, while the basic force (friction of piston rod seal/piston guide ring/separating piston) amounts to approx. 35 N (with permanent magnet with corresponding negative current), which corresponds to a spread of maximum force to basic force by a factor of 100.
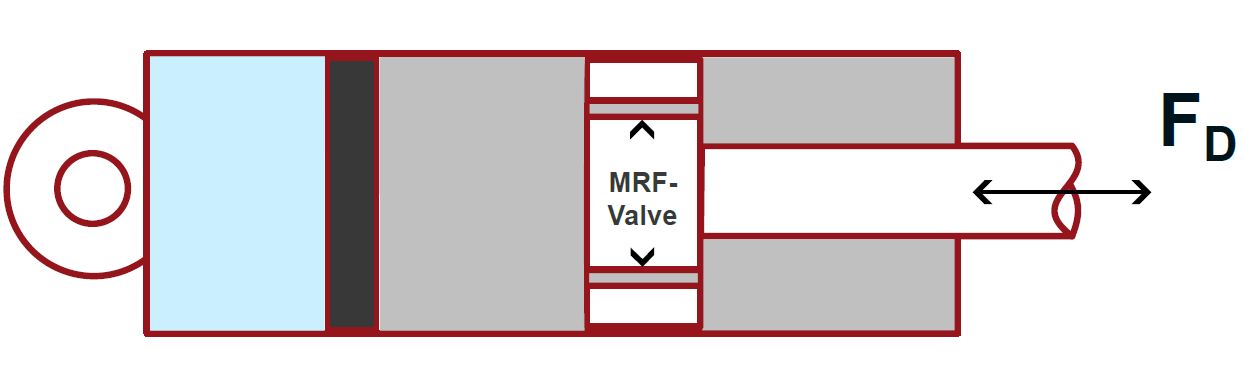
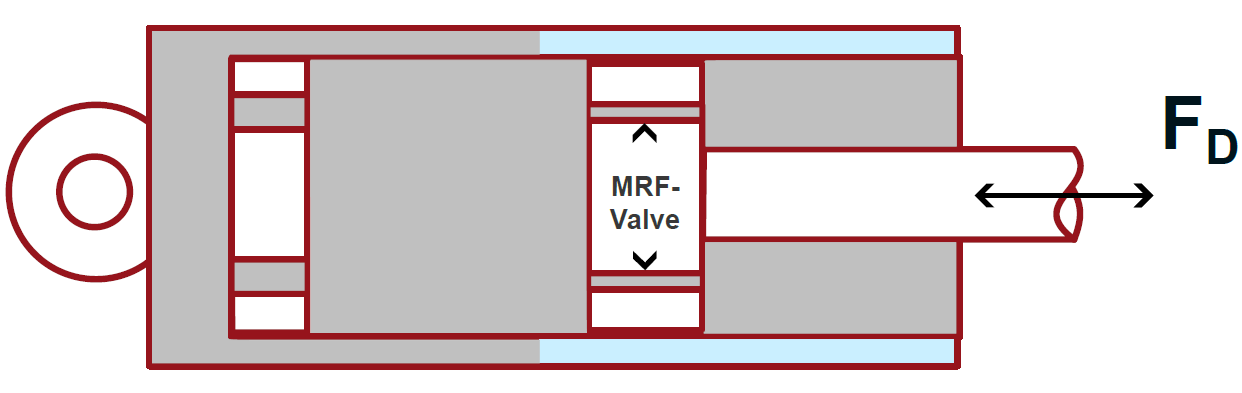
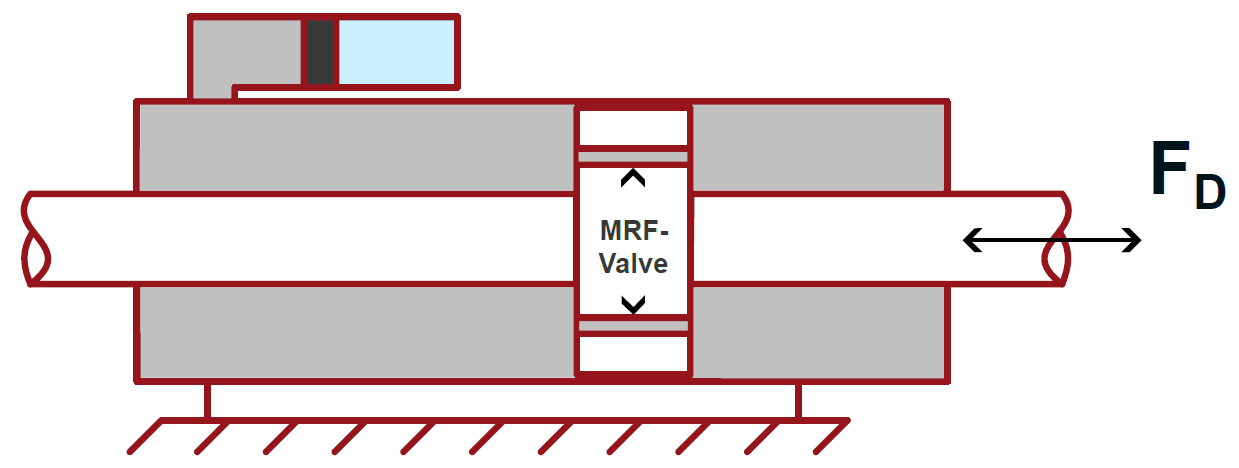
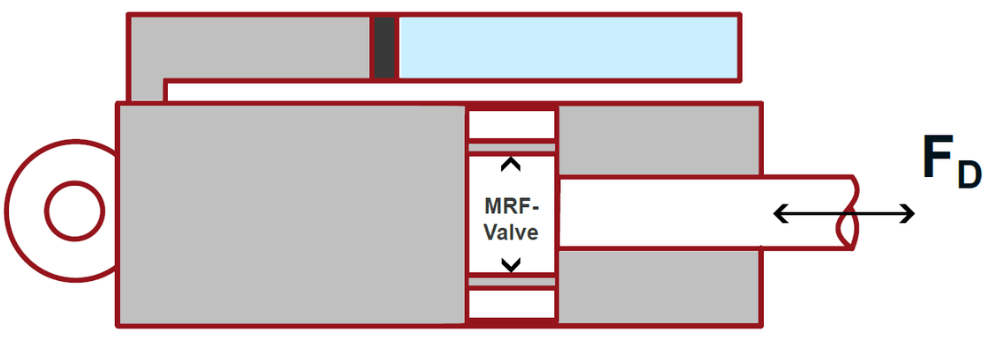
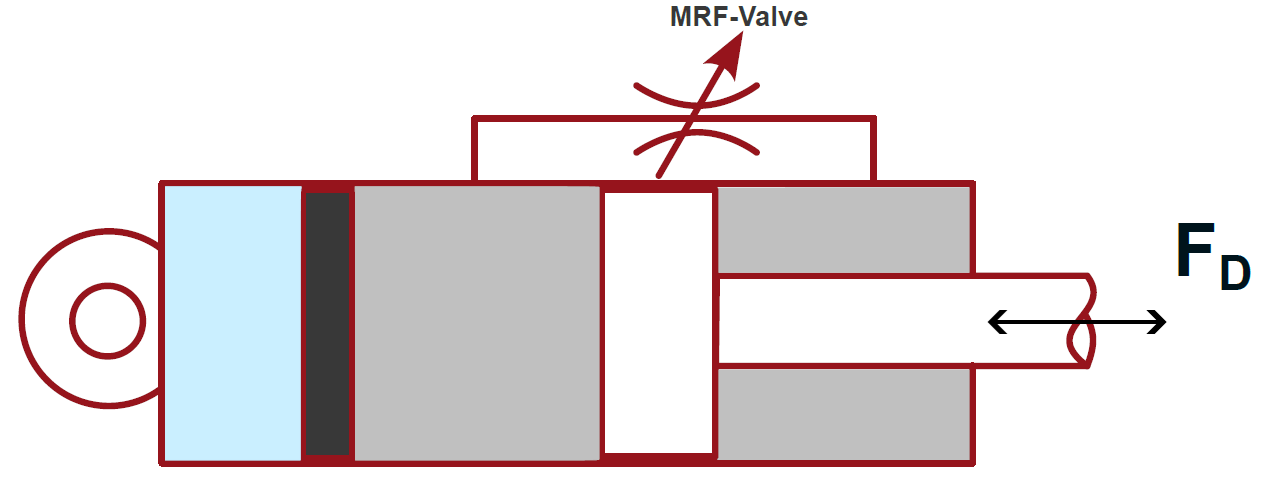
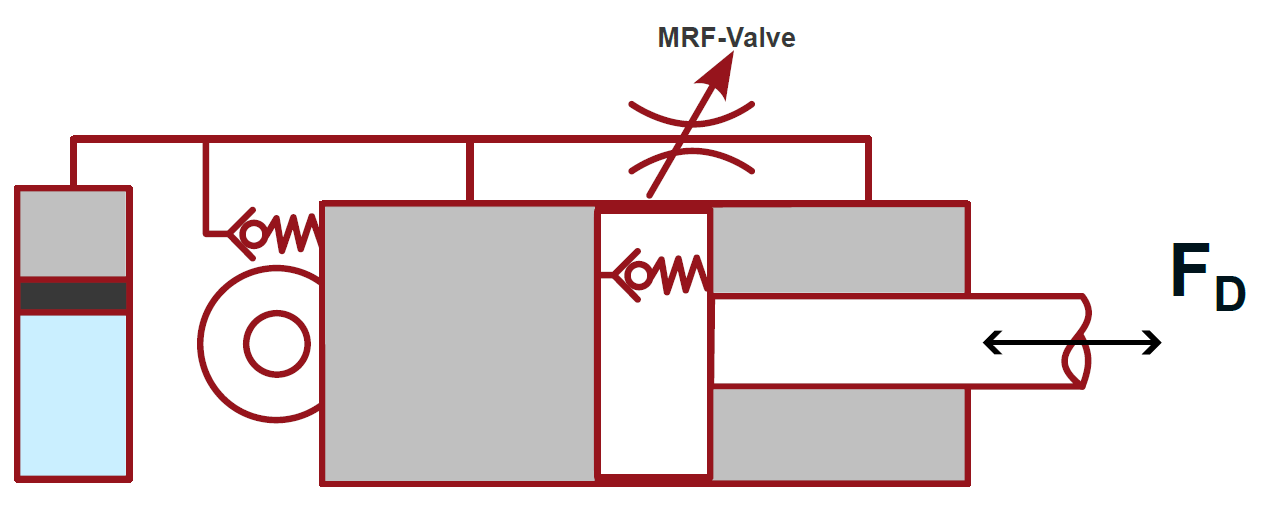
However, even higher spreads of maximum to basic force can be achieved under certain circumstances, shown here by using an externally arranged valve. In this approach, the MRF valve is not located in the piston but externally; the piston merely serves as a displacer and displaces the MR fluid, which flows back into the system in a circuit via the external valve.
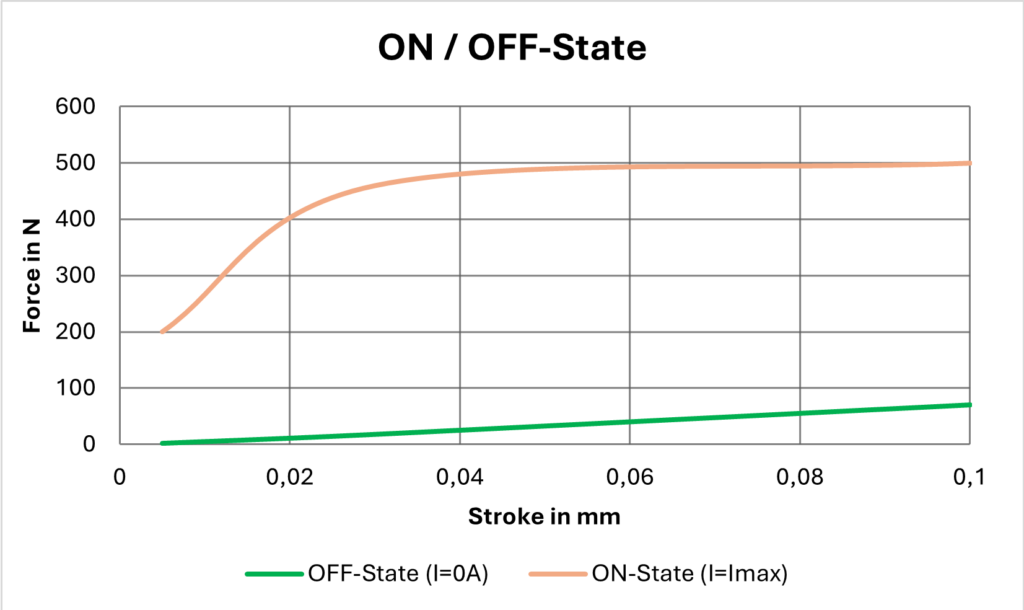
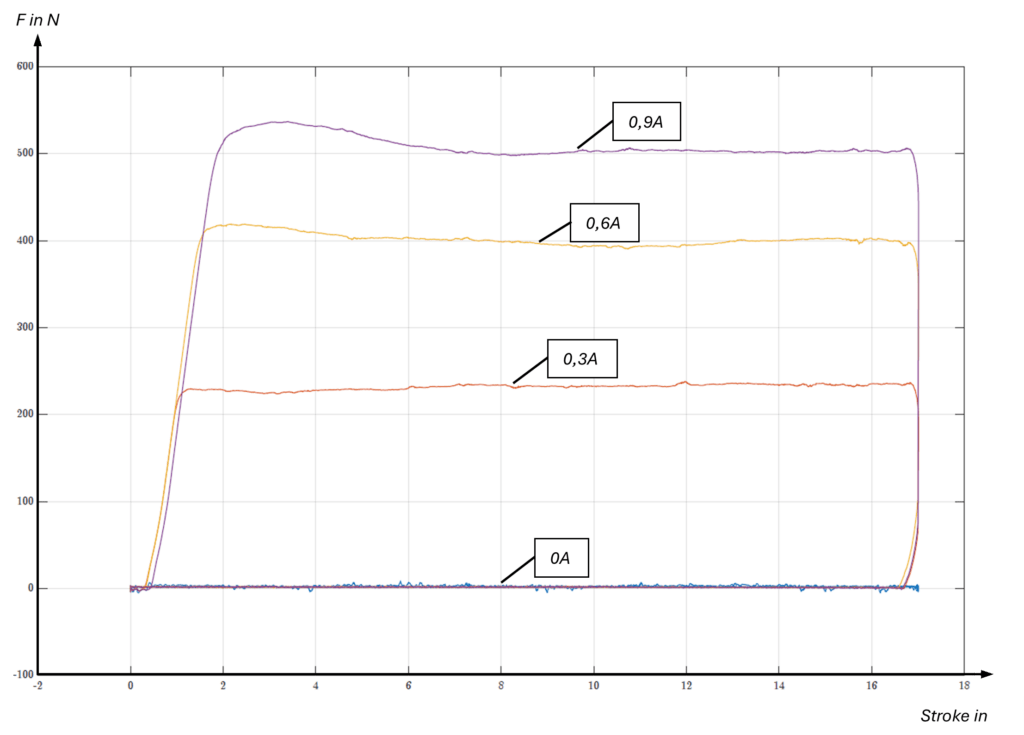
In this specific very small application (inner cylinder diameter <10 mm), the aim was to achieve an extremely low basic force of approx. 2 N and yet up to 500 N locking force could be realized. This corresponds to a spread ratio of 250.


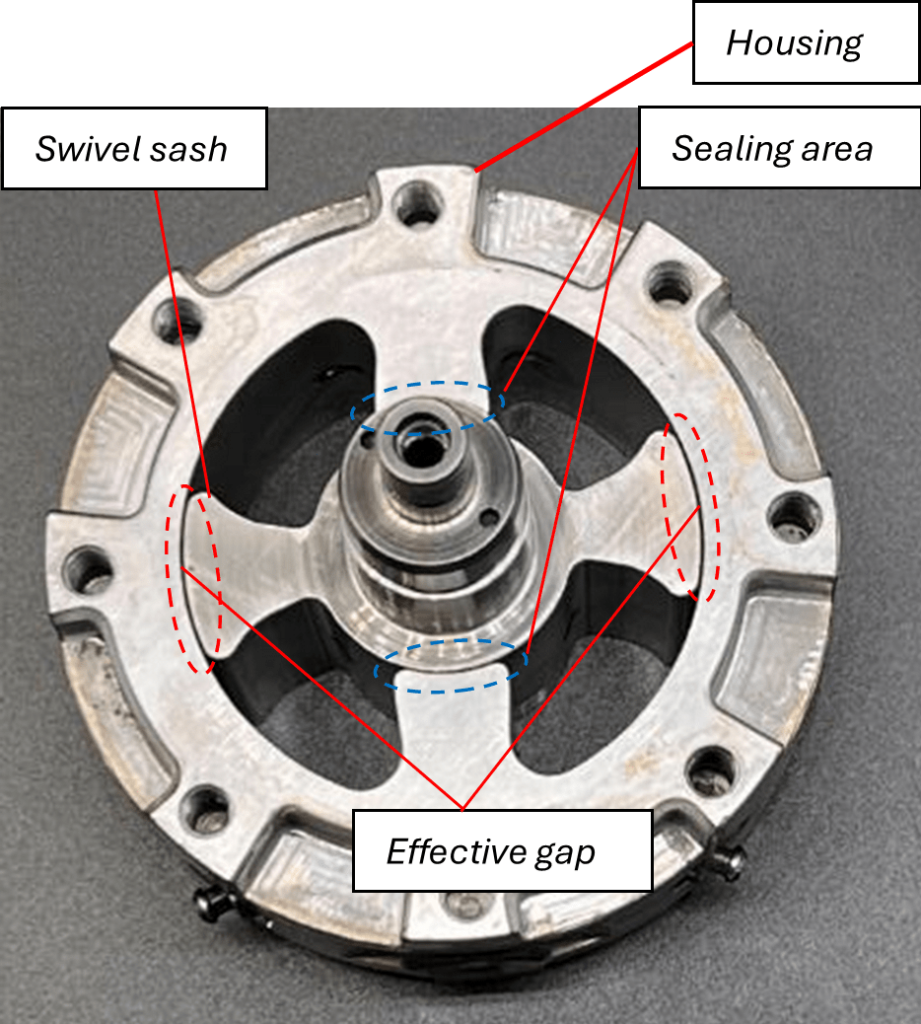
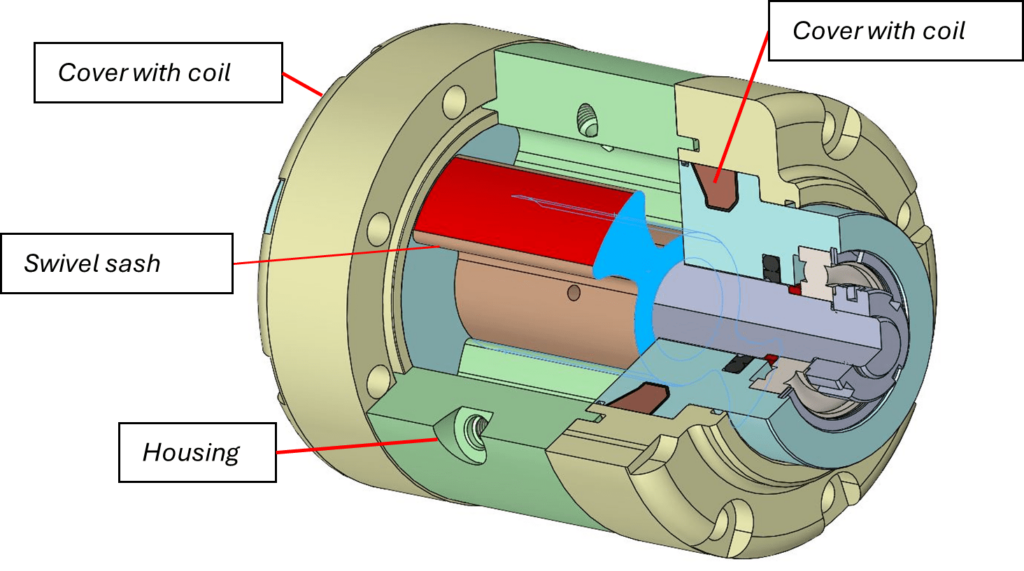
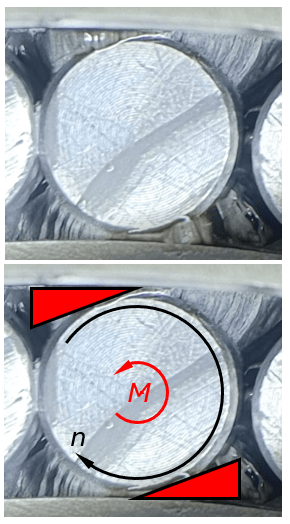
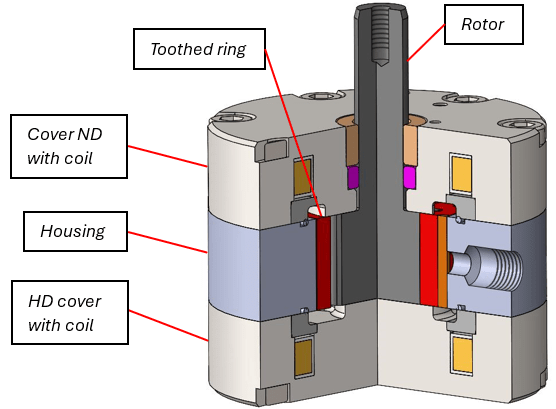
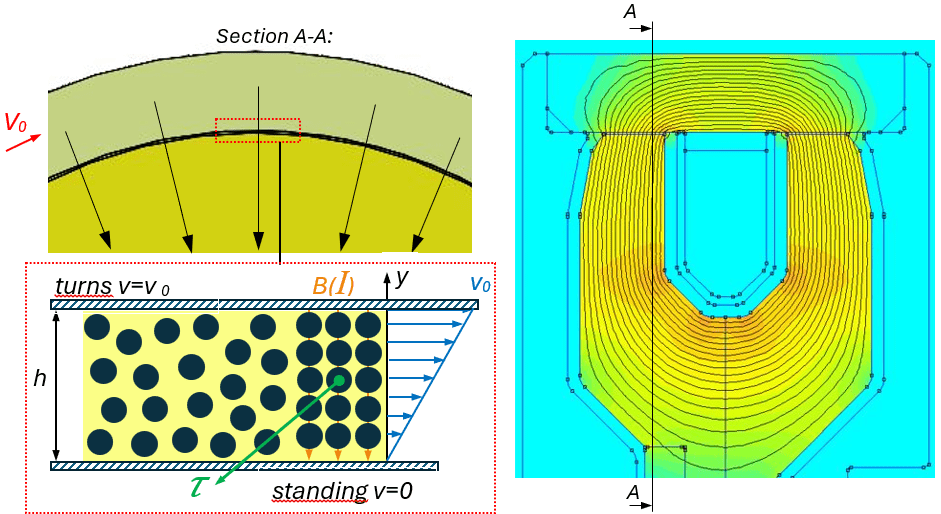
The acting magnetic field is generated by the two coils integrated in the covers and ensures that the entire rotary blade is magnetically flooded at right angles to the flow gap or the leakage gaps and that the iron particles align themselves in the direction of these magnetic field lines. Here, too, the viscosity can be varied from liquid to semi-solid in the rotary application and, depending on the magnetic field as a result of the coil current, a certain damping or torque is created in the rotary blade, which can be easily adjusted without having to change the mechanical structure of the system. A major advantage is that high static torques can be transmitted and the entire working range can be utilized – magnetic effects are superior to hydraulic effects.

Depending on the existing rotary angle or necessary torques, 3 or 4 wings can also be implemented instead of the 2-wing rotary wing shown (approx. 95° rotary angle), for example, but only partial angles can be used without mechanical transmission.
As with linear technology, INVENTUS designs corresponding pivoting vane solutions according to customer requirements and adapts the design implementation to the desired torque characteristic requirements, such as permanent solutions.
A concrete implementation is shown on the basis of an illustrated working range of a two-wing system of a roll stabilizer and describes the torque present as a function of angular velocity.


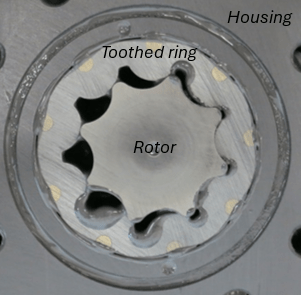
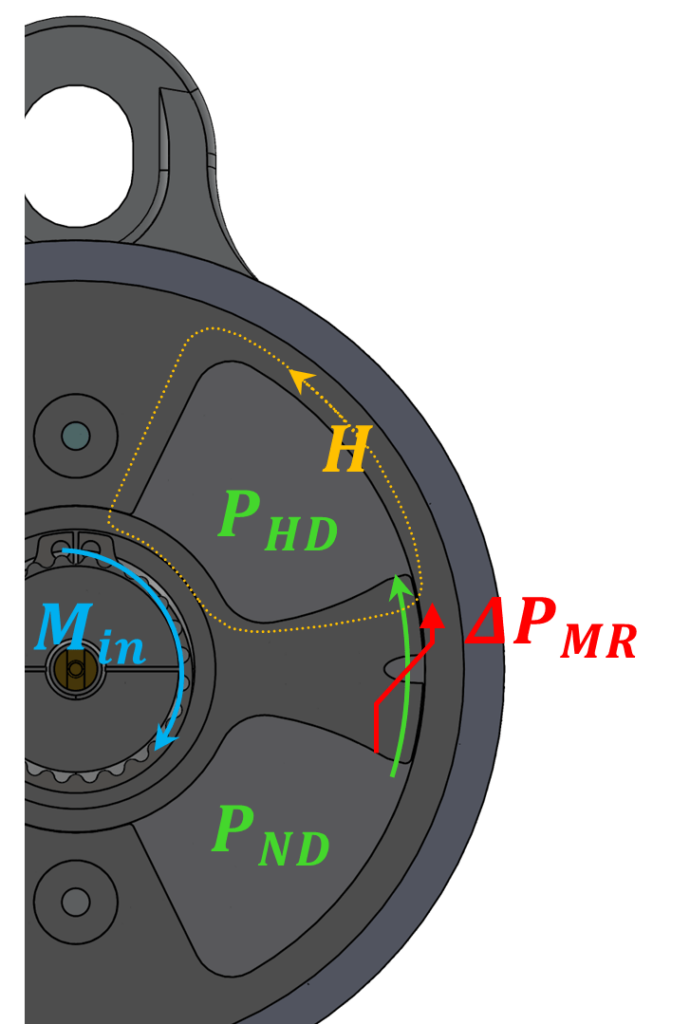
If you mentally start at the green point (Fig. 15 all 3 views) in the high-pressure area, the MRF has the highest pressure there due to the strong compression – the medium is virtually „pressed“ out of the gap through the increasingly smaller toothed gap (see Fig. 15 right) and flows into the pocket formed in the HP area in the lower cover, is distributed around the circumference and flows through the circular gap (MRF valve) into the upper LP area, where the medium is sucked in again by the gearing through the opposing kidney pockets in the upper cover.
is sucked in again.
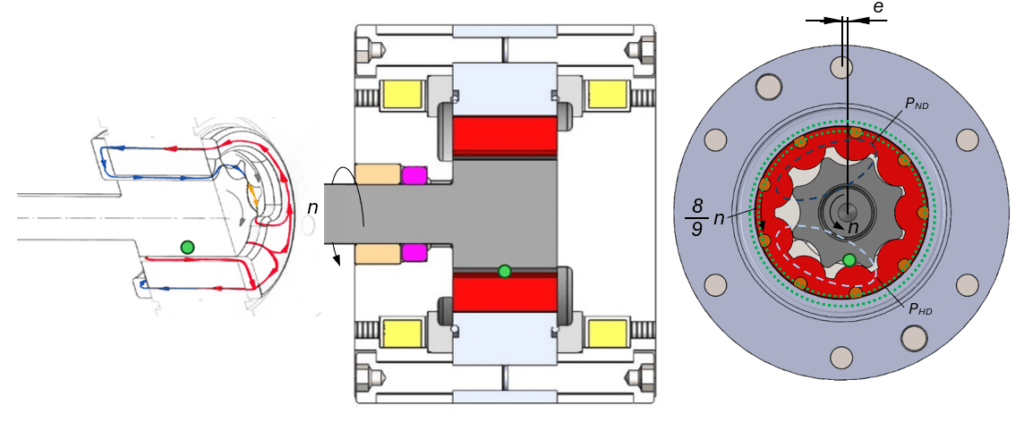
Here, too, the MRF pump is sealed by means of the orthogonal magnetic field lines hitting the gaps, and the annular gap is also controlled as an MRF valve and the magnetic influences dominate over the hydraulic influences.
It must be correctly added that this is not 100% pure FLOW mode, as the MRF particles are also squeezed to a certain extent in the working area and therefore an additional squeeze mode is effective.
The ON-OFF state diagram shows the usual behavior of an actuator operated in shear mode with the basic hydraulic damping (green characteristic curve) and the maximum damping via the additional MR effect (orange characteristic curve). The range between the two characteristic curves can be varied via control from 0-100% of the maximum coil current.
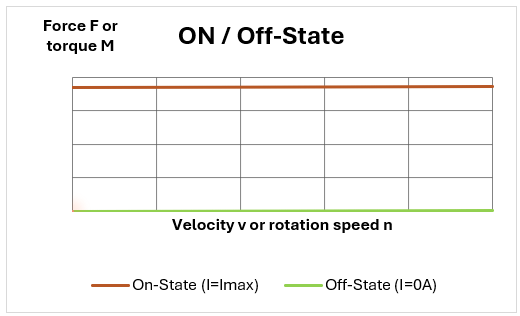
The big advantage over flow mode here is that the basic friction in particular can be kept very low due to the almost „speed-independence“ (OFF-state characteristic curve). This variable force/torque curve from 0 in milliseconds makes the application very interesting for haptic elements.
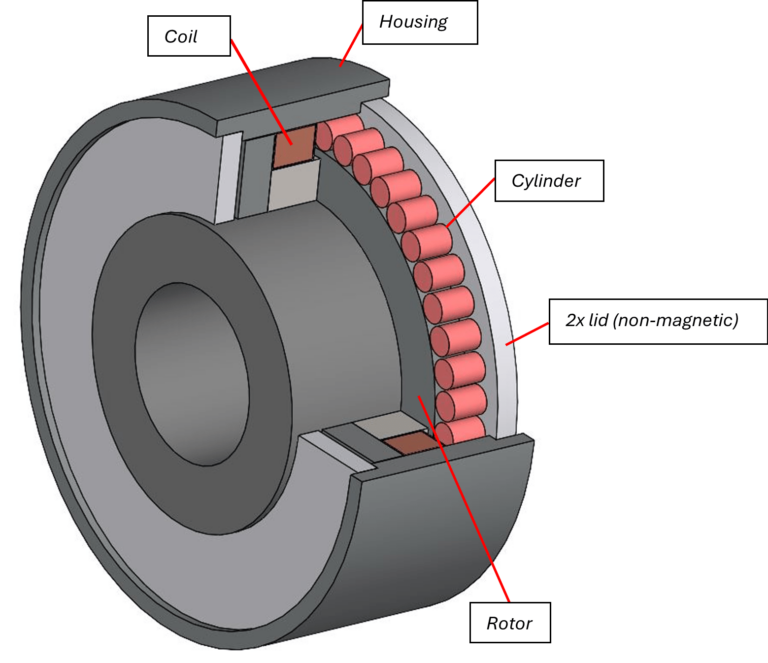
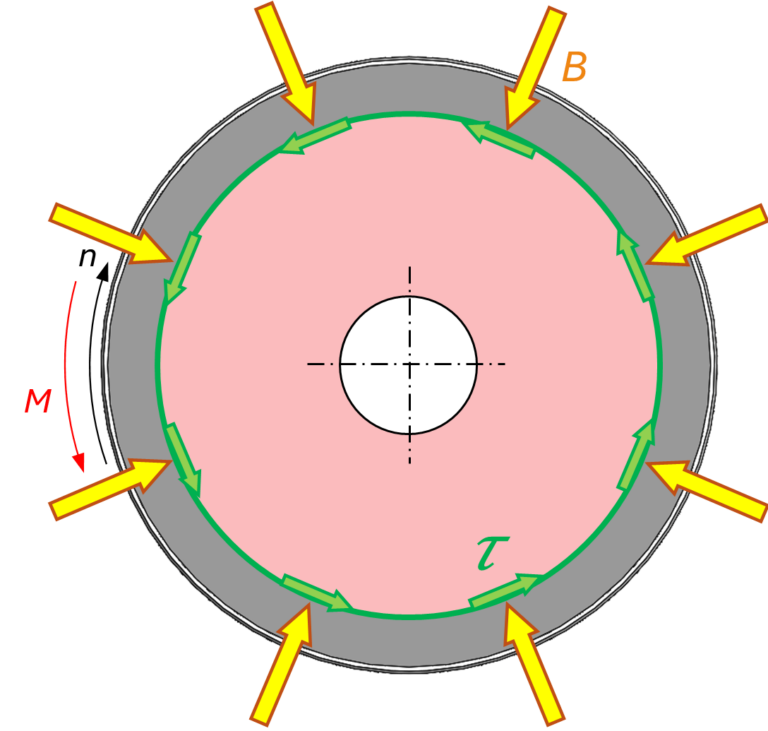
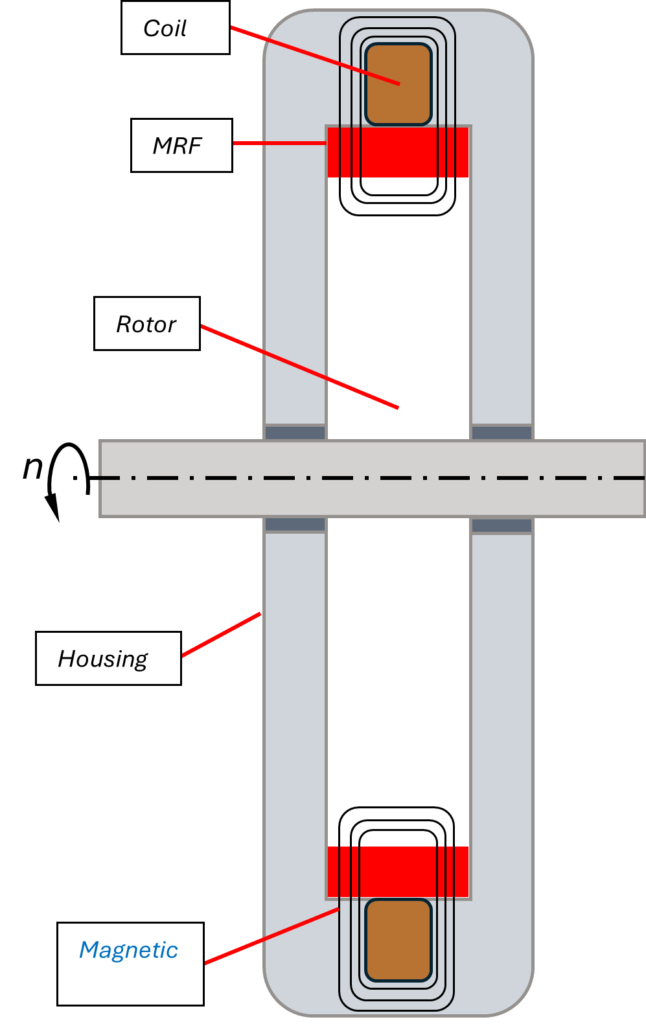
The illustration shows the second possibility of the technical design of a shear damper with the various main components, in which a rotor is rotatably mounted in a stationary housing in which the coil is integrated.
The magnetic field closes all the way around the coil housed in the housing through the MRF via the rotor, similar to variant 1 in Fig. 5.
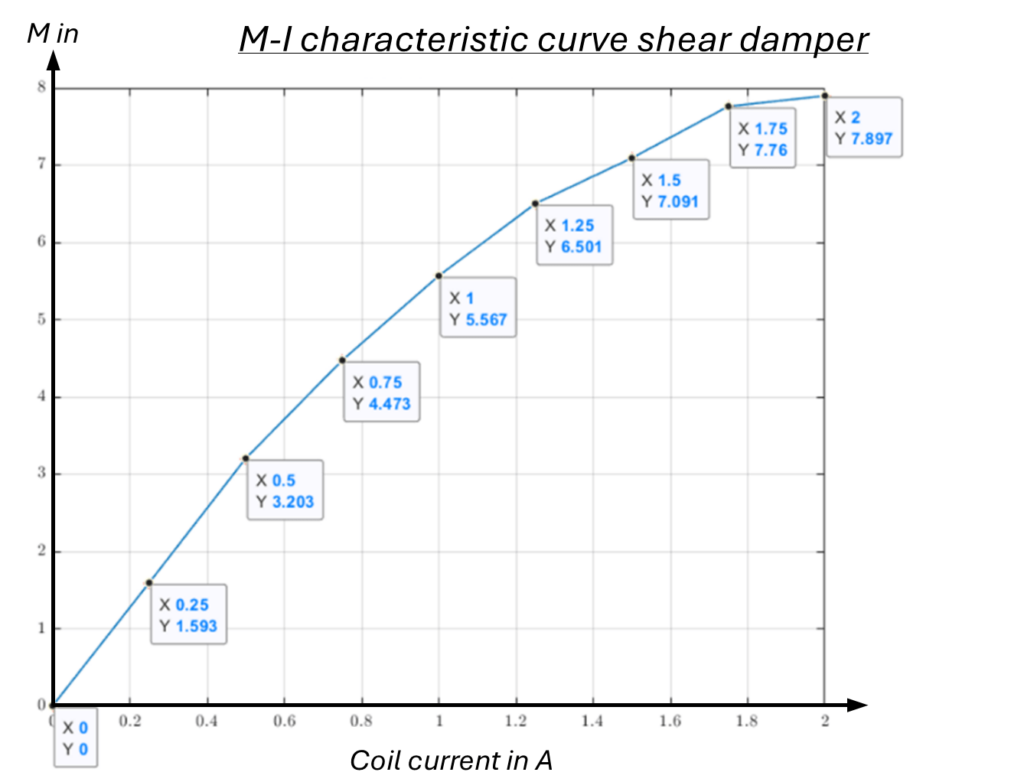
The M-I diagram with its degressive curve shows how the braking torque can be controlled via the current almost independently of the speed.